


L’équipe STI vise une approche systémique, qui fait interagir le triptyque "Infrastructure-Véhicule-Conducteur". Elle adresse des questions de sécurité, d’exploitation, de mobilité durable et d’énergie liées aux évolutions technologiques : la route du futur, la révolution numérique, les aides à la conduite, les véhicules autonomes...
Sites : Clermont-Ferrand, Toulouse ; 18 agents impliqués dont 6 chercheurs permanents (2 HDR), 2 chercheurs associés, 6 doctorants et Post-doctorants.
L’action de l’équipe vise à répondre aux enjeux des politiques publiques œuvrant dans les domaines de la mobilité, du numérique, des transports, des infrastructures, de la sécurité routière et de la cohésion des territoires. La mobilité des biens et des personnes constitue un élément essentiel de la vie des individus et de notre société qui est face à des défis en termes de mobilité et d’innovations technologiques.
Pour préparer la mobilité de demain, nous devons :
- anticiper les problématiques liées au développement des STI, à la mobilité numérique et à l’automatisation des véhicules ;
- participer à la réduction de l’insécurité routière en exploitant les opportunités des mégadonnées pour prévenir les accidents et anticiper les enjeux de demain ;
- être au cœur de l’innovation et accompagner l’appropriation des innovations technologiques ;
- contribuer au développement et à la cohésion des territoires durables et résilients.

Les travaux de l’équipe portent sur les Systèmes de Transports Intelligents adossés à l’infrastructure de transport, ou plus largement, les systèmes de gestion des déplacements à l’échelle des territoires. Dans une approche systémique de la mobilité des biens et des personnes, l’équipe prend en compte les bouleversements attendus par l’introduction des véhicules autonomes, ou à délégation de conduite au sein des systèmes de transport.
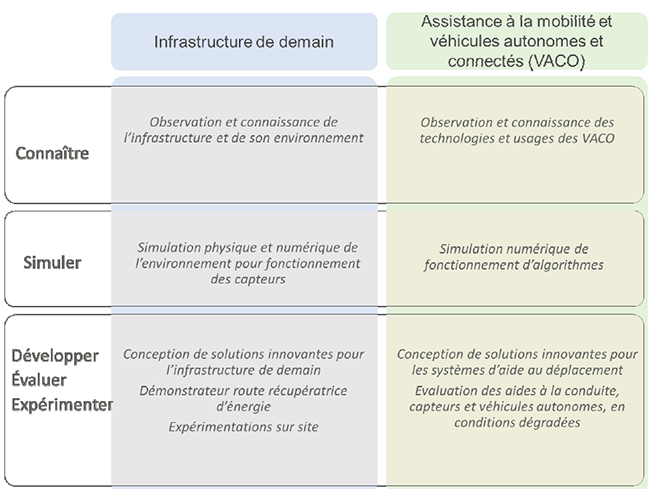
Sa recherche est articulée autour de deux axes scientifiques, représentant deux objets d’études :
- Axe 1 – L’Infrastructure de demain (R5G, smart city, mobilité numérique, billettique…) ;
- Axe 2 – L’Assistance à la mobilité et véhicules autonomes (Systèmes embarqués, capteurs, bases de données…).
Les recherches relevant de l’axe 1 visent à contribuer à l’amélioration des systèmes de transports intelligents en adoptant une approche à trois niveaux :
- le premier niveau s’intéresse à l’observation de l’infrastructure via le réseau de capteurs associé, avec l’objectif de proposer des approches innovantes pour en déduire son usage, son état ou sa sécurité ;
- le deuxième niveau tire profit de la connaissance acquise sur l’infrastructure pour proposer des solutions d’aide à la décision visant à mieux organiser, planifier et prévoir son utilisation ;
- le troisième niveau adopte une approche plus prospective et s’attache à penser l’infrastructure de demain, qu’elle soit concrète ou virtuelle.
Les recherches inscrites de l’axe 2 s’intéressent aux bouleversements induits par l’introduction des véhicules à délégation de conduite et des véhicules autonomes au sein des systèmes de transport. Pour aborder cette problématique, la démarche retenue dans cet axe de travail va s’appuyer sur les niveaux d’automatisations de la conduite définis par le SAE (Society of automotive Engineers) pour se décliner en deux sous-axes de recherche :
- le premier s’intéressera aux nouvelles interactions liées à l’automatisation de la conduite et à sa connectivité ;
- le deuxième portera sur l’évaluation des véhicules autonomes, sur les aspects technologiques, et, dans le cadre de projets de déploiement de véhicules autonomes.
La complémentarité entre ces deux axes de recherche permettra à l’équipe de se positionner sur une grande variété de sujets en lien avec les STI. Les principaux enjeux sont : - le recueil et l’expertise de données générées par la mobilité numérique ;
- la production d’information et d’algorithmes d’aide à la décision pour organiser, planifier et prévoir l’utilisation d’un système de transport intelligent ;
- la conception et l’évaluation multidimensionnelles de solutions technologiques innovantes pour la mobilité de demain et son infrastructure ;
- la prise en compte des conditions opérationnelles dégradées pour une meilleure robustesse des systèmes de transport ;
- l’impact des véhicules autonomes sur la mobilité du futur.
Les principaux verrous scientifiques identifiés :
- le développement de techniques de traitement de grandes masses de données (« big data ») issues de la mobilité numérique ;
- la modélisation d’indicateurs associés aux performances d’un système de transport intelligent;
- la mise au point de méthodes d’apprentissage approfondi pour identifier des situations ou événements précis dans de grandes masses de données ;
- la conception de méthodes de détection et d’analyse robustes en conditions dégradées ;
- le développement d’outils expérimentaux et de modélisation des nouveaux services apportés par l’infrastructure de transport, tant sur le plan énergétique que sur le plan digital ;
- l’évolution des outils statistiques de mesure du risque routier individuel ;
- la conception de méthodologies d’évaluation d’un véhicule autonome.
Disciplines mobilisées :
Les disciplines mobilisées sont les suivantes : Statistique, mathématiques-appliquées, IA, apprentissage-machine, fusion-de-données, métrologie, physique, photométrie, modélisation physique de-capteurs, modélisation de l’atmosphère, météorologie, vision artificielle, radiométrie, modélisation des transferts thermique et de masse… A noter que ces champs disciplinaires sont au coeur des développements de l’Intelligence artificielle pour apporter des outils, méthodes pour traiter des thématiques appliquées des Systèmes de Transports intelligents.
Les résultats visés sont de diverses natures: il peut s’agir d’outils, de méthodologies, d’algorithmes, d’apport de connaissances :
- Algorithmes pour la surveillance et la détection des comportements humains dans les milieux très confinés ;
- Algorithmes pour la détection des situations potentiellement dangereuses aux passages à niveaux ;
- Algorithmes pour la mesure météorologique par caméra et évaluation des dispositifs en bord de voie en conditions météorologiques dégradées ;
- Modélisation multispectrale de la transmission de la lumière dans le brouillard, et validation expérimentale dans les gammes de capteurs ADAS ;
- Définition des cas d’usages et d’indicateurs de performance pour mettre au point une méthodologie d’évaluation de chaînes logistiques ;
- Méthodologie d’évaluation multicritère des systèmes embarqués connectés en situation de conduite réelle et pour la réduction des émissions sur un itinéraire ;
- Outils de constructions/validation d’une cartographie digitale de l’infrastructure de transports à partir des données de véhicules traceurs ;
- Outils de dimensionnement des nouvelles infrastructures récupératrices d’énergie au regard des besoins des territoires ;
- Méthodologie de mesure des caractéristiques de réflexion de surfaces routières ;
- Analyses statistiques des données d’accidentalité ou d’incidentalité selon des cas d’usages potentiellement critiques pour les futurs véhicules autonomes en interaction avec d’autres usagers ;
- Méthodologie d’évaluation et protocoles de tests permettant d’évaluer objectivement les capteurs isolés ou intégrés au véhicule ;
- Méthodologie d’évaluation des systèmes connectés, définition d’indicateurs ;
- Méthodologie d’évaluation in-situ pour les navettes autonomes.
L’équipe développe et exploite les équipements scientifiques suivants :
- En laboratoire
- Plateforme R&D Brouillard et Pluie,
- Goniophotomètres, Oculomètres et visiotest
- Station de deep learning pour le traitement d’images
- Sur le terrain en site propre
- Démonstrateur de route chauffante et récupératrice d’énergie
- Station fixe d’acquisition des données météorologiques et vidéos sur autoroute (A75)
- Déployables sur les terrains d’expérience
- Systèmes de vision artificielle dans le visible et l’infrarouge avec cibles calibrées
- Matériels d’acquisition, de traitement et d’enregistrement de données de surveillance ( radar hyperfréquence, compteurs doppler, caméras, capteur Kinect, mât télescopique, plateforme informatique de calcul et de stockage)
- Plateforme d’acquisition des données issues de capteurs Bluetooth basée sur l’Internet des objets (IoT) par protocole MQTT ;
- Partenaires institutionnels, Établissements publics : UNI-EIFFEL, IGN, IRSTEA, Météo France, VTT ;
- Partenaires académiques français et internationaux : Université Clermont Auvergne (Institut Pascal, LAPSCO, LABEX ImobS3), Paris-Est, Toulouse, Belfort Montbéliard, Carlos III de Madrid (Espagne), Institut National d'Optique (INO) (Canada), New Castel (UK), - Université de Sousse (Tunisie), institut de recherche CERTH, Grèce, TNO Pays-Bas, LAB (Laboratoire d'accidentologie, de biomécanique et d'études du comportement humain) PSA/Renault, Ircam Paris...
- Pôles de compétitivité : ViaMéca, CARA, Movéo, Tenerrdis, Indura, ID4CAR, Aerospace Valley ;
- Partenaires privés : Renault, PSA, Orange, SNCF, Michelin, Continental, MAPTM, GeoLoc Systems, DYNNIQ, Daimler, Autoliv, Hitachi, IBEO , Innoluce, Moduligh, Oplatek, Vaisala, Xenics, ENSIS-Optis, Zehnter...
Camille Gramaje, 2024-2027, Toulouse (Doctorante Université Toulouse Jean-Jaurès), "Aide à l’adoption de compétences et connaissances nécessaires à une adaptation correcte de l’enfant à la situation de piéton dans un environnement urbain", Direction : Céline Lemercier (Jean-Jaurès), Aurélie Simoes (Jean-Jaurès), Guillaume Saint Pierre (Cerema STI).
Hamed Ouattara, 2023-2026, Clermont-Fd (Doctorant Université de Clermont Auvergne, Institut Pascal) " Modélisation de l’impact et mesure des conditions météorologiques dégradées par vision artificielle ". Direction : Frédéric Bernardin (Cerema STI), Omar Ait Aider (Institut Pascal), Co-encadrement : Pierre Duthon (Cerema STI), Pascal Salmane (Cerema STI).
Maria Ruchiga, 2021-2024, Toulouse, (Doctorante Cerema et Université Gustave Eiffel), " Modélisation et simulation stochastique des capacités de réduction du risque routier par les véhicules autonomes" , Direction : Guillaume Saint Pierre, Dominique Gruyer (UGE), encadrant : Rémi Sainct (UGE).
Ali Krayem, 2021-2024, Clermont-Fd (Doctorant Université de Clermont Auvergne, LABEX ImobS3) " Estimation par méthode inverse des propriétés optiques d’un milieu diffusant sous lumière polarisée - Application à l’impact du brouillard sur la perception artificielle " . Direction : Frédéric Bernardin (Cerema STI), Arnaud Münch (UCA, Laboratoire de Mathématiques), Co-encadrement : Santiago Royo (Université de Catalogne).
Post-doctorant
Recrutements en cours.
Alternant
Majid Lamssalek, 2024-2026, Toulouse, alternant M2 informatique au CNAM, Direction : Josué Rivera (Cerema STI), Jean-Paul Garrigos (Cerema STI).
NguyenMinh Mai, 2019-2022 - Toulouse, (Doctorant à l’IRIT Toulouse), " Segmentation sémantique d’image par approche ontologique. Application à la perception de l’environnement d’un véhicule autonome pour la détection d’obstacles par météo tout temps " , Direction (Louahdi Khoudour), co-encadrants : Alain Crouzil (IRIT), Pierre Duthon
Prince Sévi, 2020-2023 –Clermont-Fd (Doctorant Université de Savoie Mont Blanc, financement Région Dromotherm) " Caractérisation mécanique et énergétique de l’échangeur Dromotherm et valorisation en lien avec les usages du bâtiment " . Direction : Benoit Stutz (USM), Frédéric Bernardin (Cerema STI), Co-encadrement : Alexandre Cuer, Evelyne Toussaint
Mathieu Labussière, 2018-2021 –Clermont-Fd (Doctorant Université de Clermont Auvergne, LABEX ImobS3) " Contributions à la perception multi-sensorielle en milieu perturbé par apprentissage profond" . Direction : Omar Ait Aider, Frédéric Bernardin (Cerema STI), Co-encadrement : Céline Teulière
Khouloud Dahmane, Clermont-Fd, (Doctorante Université de Clermont Auvergne, LABEX ImobS3) : " Analyse d'images par méthode de deep learning appliquée au contexte routier en conditions météorologiques dégradées " , Thèse soutenue le 17 juin 2020, Direction : Frédéric Chausse, Frédéric Bernardin (Cerema STI), Co-encadrement : Christophe Blanc, Michèle Colomb (Cerema STI)
Yann Meneroux, (Doctorant Université de Paris-Est & IGN) : " Utilisation des véhicules traceurs et des données géographique pour la construction d’une infrastructure routière numérique " .Thèse soutenue le 28 novembre 2019, Direction : Sébastien Mustière, Guillaume Saint Pierre (Cerema STI). Co-encadrement : Arnaud Le-Guilcher, Olivier Orfila. Lauréat du Prix de la Chaire Sanef Abertis 2020, catégorie « thèse en sécurité routière ».
Huy-Hieu Pham, (Doctorant Université Paul Sabatier Toulouse III) : " Architectures d’apprentissage profond pour la reconnaissance d’actions humaines dans des séquences vidéo RGB-D monoculaires. Application à la surveillance dans les transports publics " . Thèse soutenue le 19 septembre 2019. Direction : Louahdi Khoudour , Co-encadrant : Alain Crouzil (IRIT)
Jérémy Matias, (Doctorant LABEX ImobS3, Université de Clermont-Auvergne) : " Perception visuelle et anticipation motrice dans les systèmes de traitement de l’information biologiques et artificiels " Thèse soutenue le 16 Juillet 2019 – Direction : Laeticia Sylvert, Co-encadrement :Jean-Charles Quinton, Marie Izaute, Michèle Colomb (Cerema STI)
Boris Quétard, (Doctorant LABEX ImobS3, Université de Clermont-Fd) : " Perception visuelle et anticipation motrice dans les systèmes de traitement de l’information biologiques et artificiels " Thèse soutenue le 10 avril 2018 – Direction : Marial Mermillot, co-encadrement : Jean-Charles Quinton, Marie Izaute, Giovanni Pezzullo, Michèle Colomb (Cerema STI)
Pierre Duthon, (Doctorant Cerema), " Descripteurs d’images pour les systèmes de vision routiers en situations atmosphériques dégradées et caractérisation des hydrométéores " , Thèse soutenue le 1er décembre 2017, Direction : Frédéric Chausse, Co-encadrement : Frédéric Bernardin, Michèle Colomb, (Cerema STI)
Vous avez une question ?